For marine craft it is often desirable to derive the equations of motion for an arbitrary coordinate origin (CO).
The equations of motion can be transformed from the CG to the CO using the following transformation matrix:
![]()
Newton-Euler equations in matrix-vector form about the CG

Newton-Euler equations in matrix-vector form about the CO
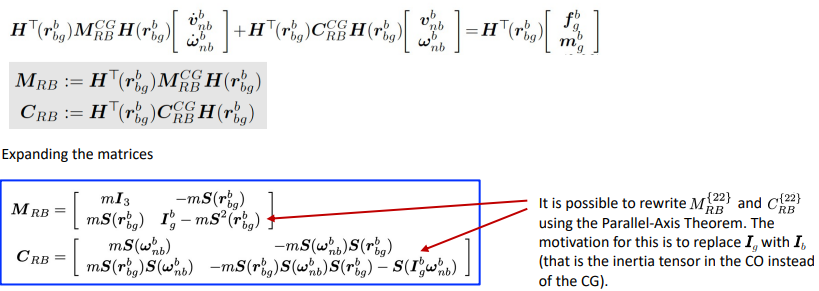
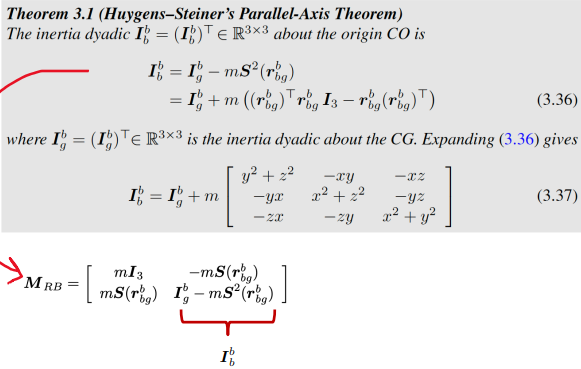
Parallel-axis theorem
Translational motion about the CO expressed in {b}
![]()
Rotational motion about the CO expressed in {b}
