For small UAVs, a major issue is wind
- Always present to some degree
- Usually significant with respect to commanded airspeed
Wind makes traditional trajectory tracking approaches difficult, if not infeasible.
- Have to know the wind precisely at every instant to determine the desire airspeed
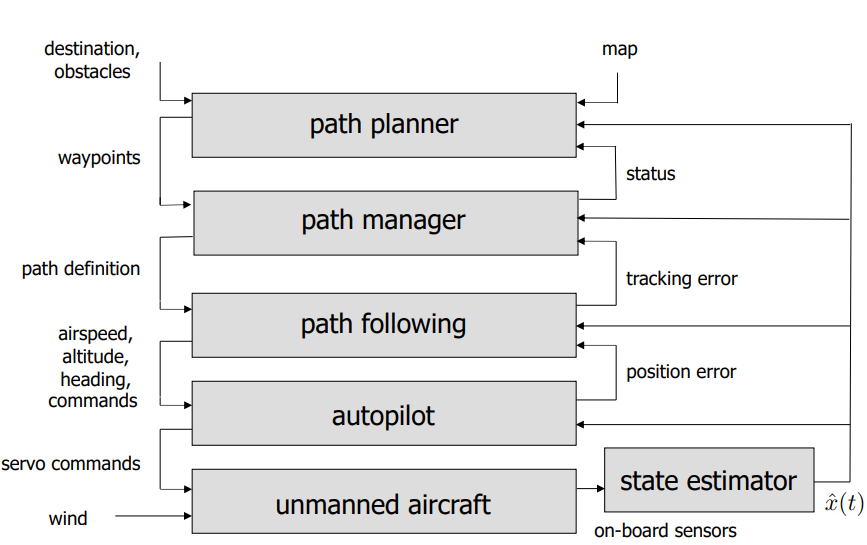
Better approach: path following Rather than “follow this trajectory”, we control the UAV to “stay on this path”.
Path types
Straight lines between two points in 3-D
- Inclination of path within climb capabilities of UAV
- Circular orbits or arcs in the horizontal plane
Paths for common applications can be built from these path primitives
- Methods for following other types of paths found in literature
We need an algorithm for each of the path primitives.
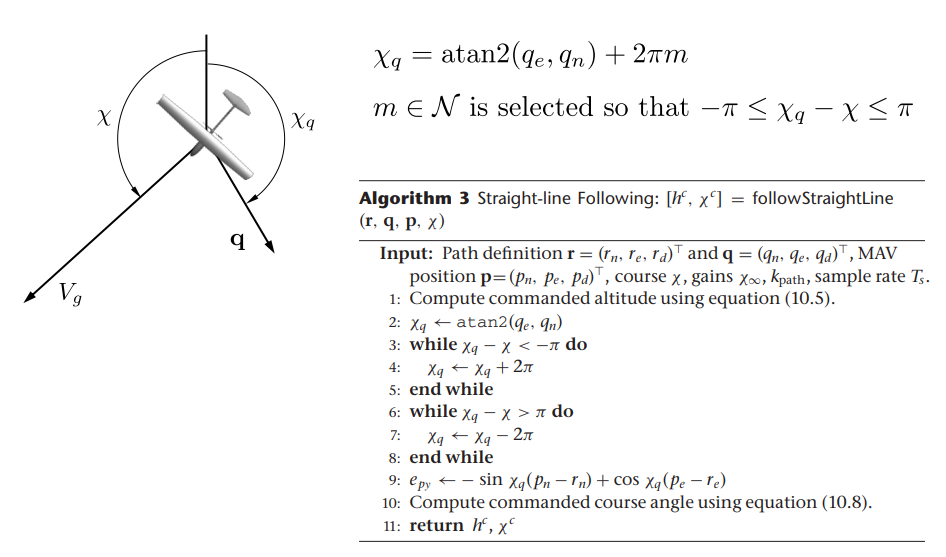
Straight line path description
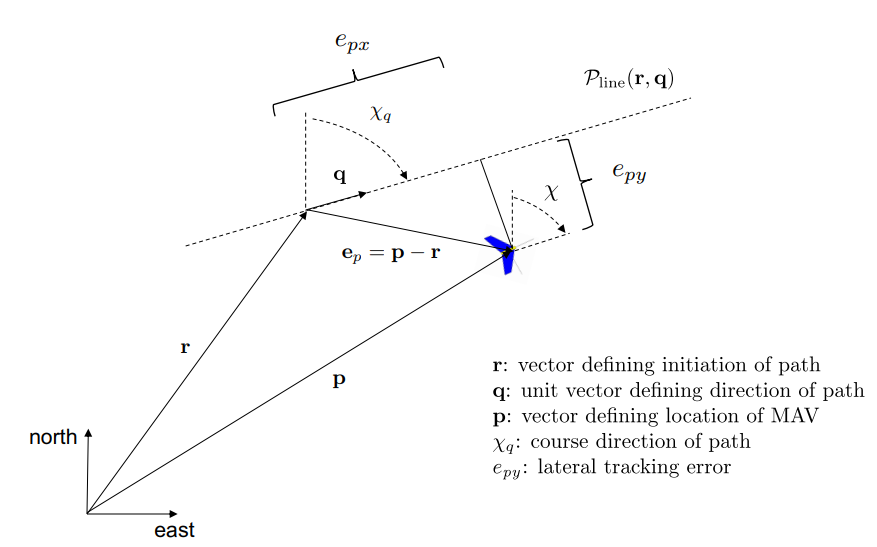
Lateral tracking problem
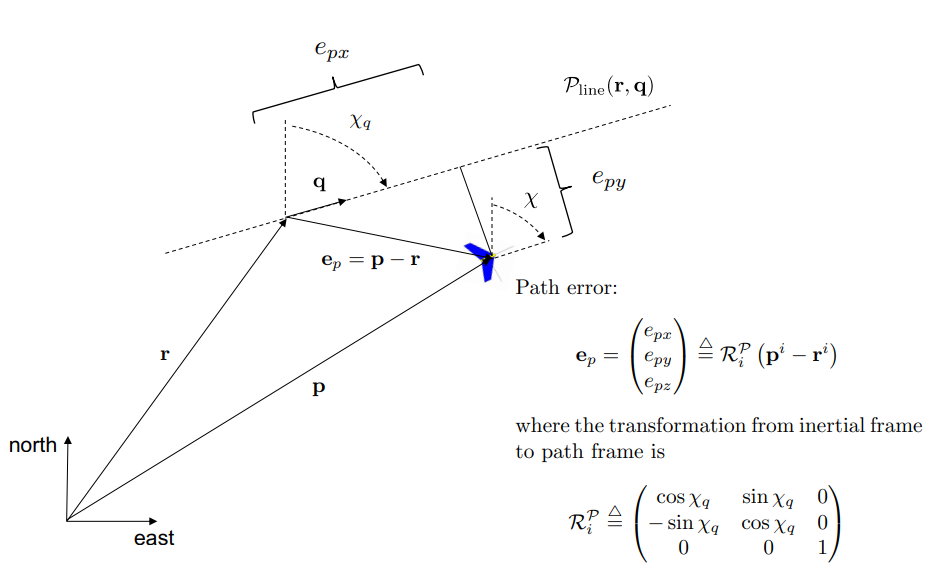
Relative error dynamics in path frame:
Regulate the cross-track error to zero by commanding the course angle:
Select so that
course autopilot.
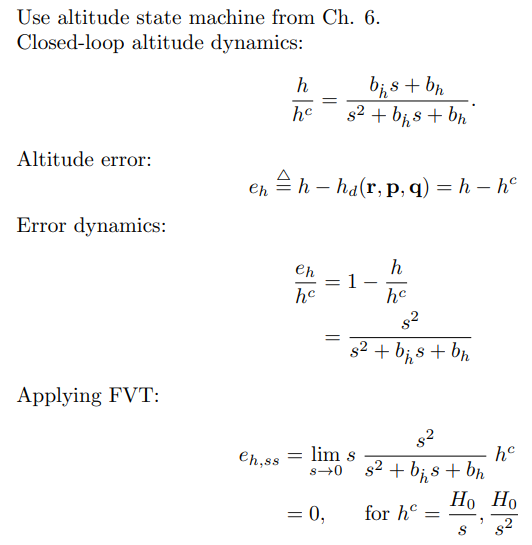
Longitudinal tracking problem
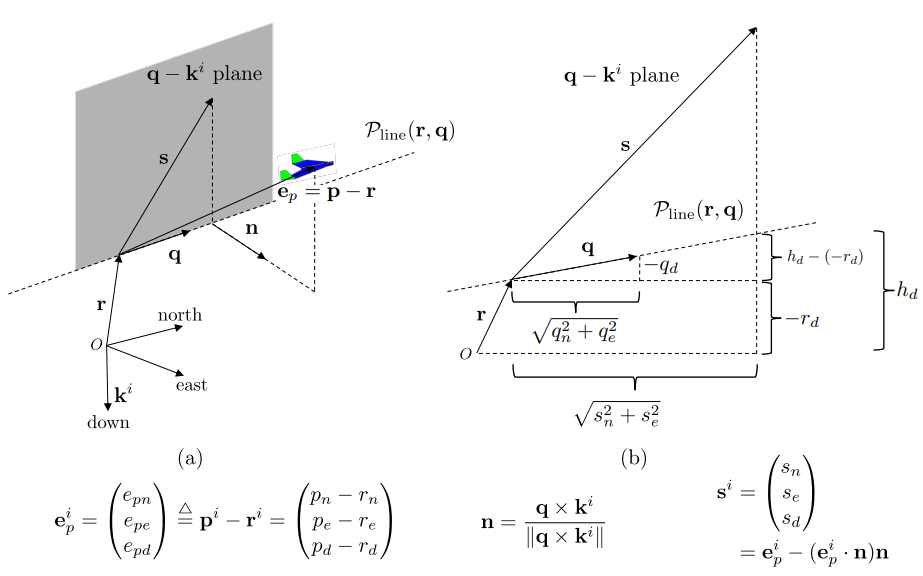
By similar triangles
Desired altitude based on current location
Select so that
Longitudinal guidance strategy
Lateral tracking- Vector field concept
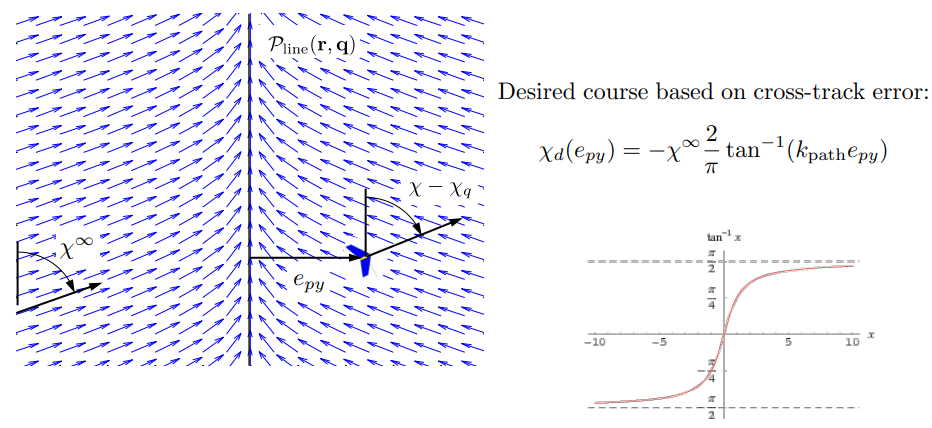
Vector field tuning
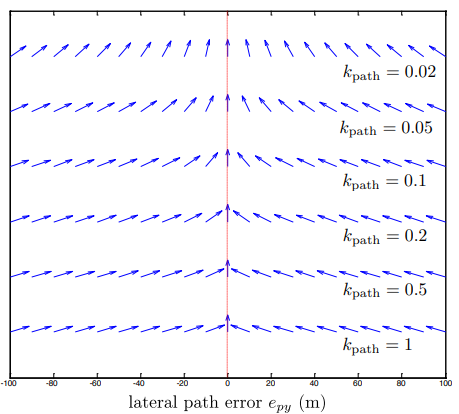
is a positive constant that affects the rate of transition of the desire course
- large → short, abrupt transition
- small → long, gradual transition
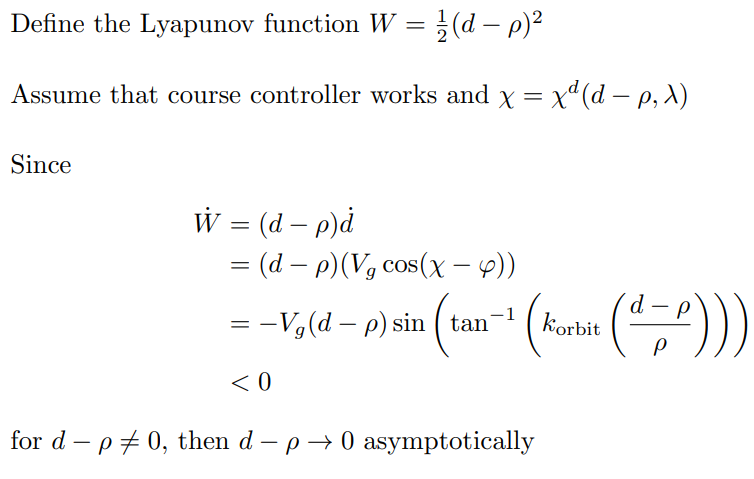
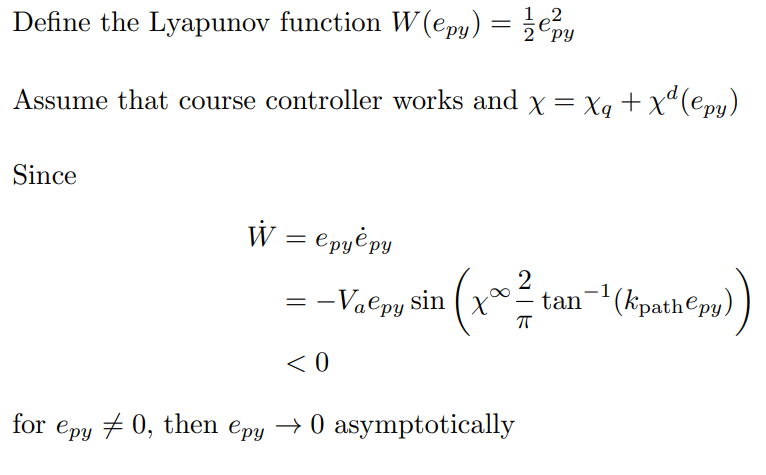
Lyapunovs 2nd method
For a system having a state vector , consider an energy like function : such that
for and for
If such a function can be defined, then goes to zero asymptotically and the system is stable.
Lateral tracking stability analysis
Smallest angle turn logic
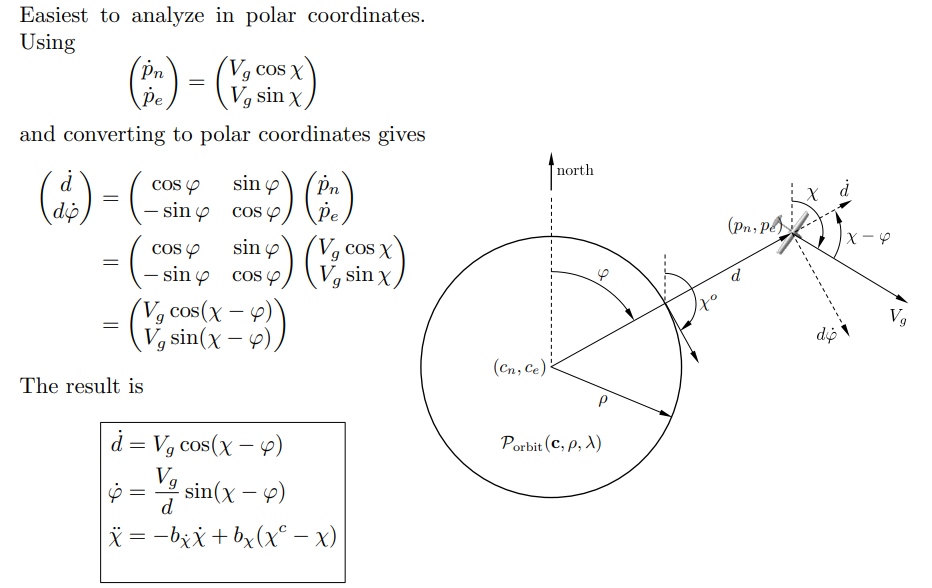
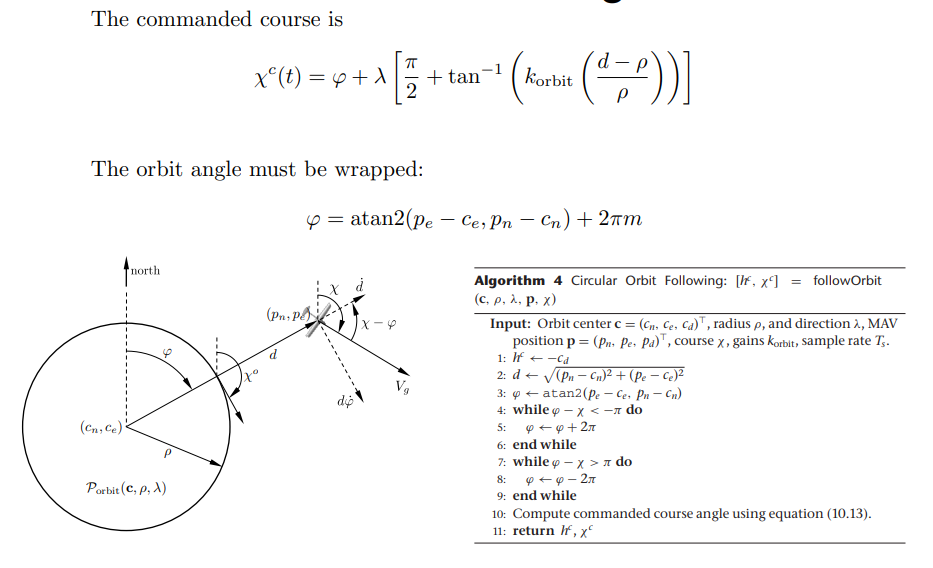
Orbit following
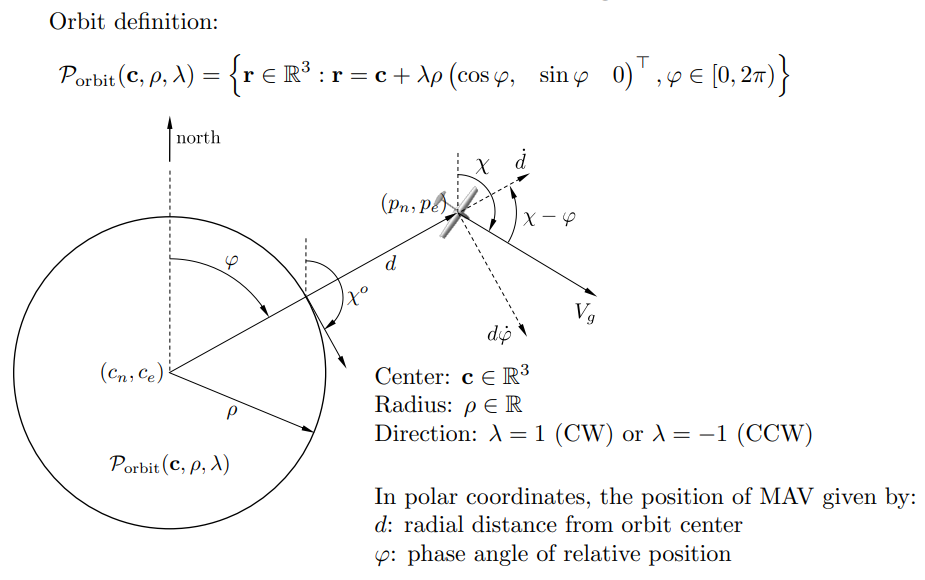
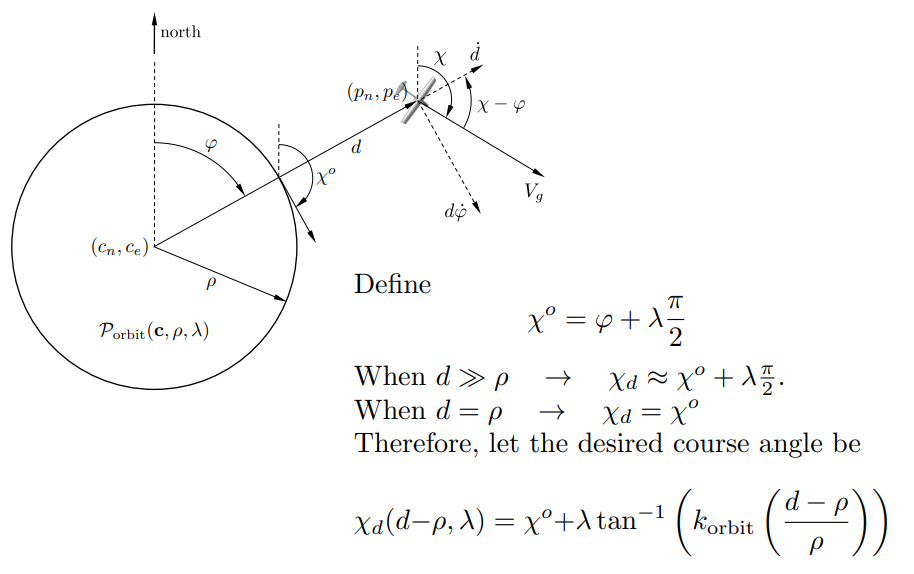
Algorithm
Orbit tracking stability analysis