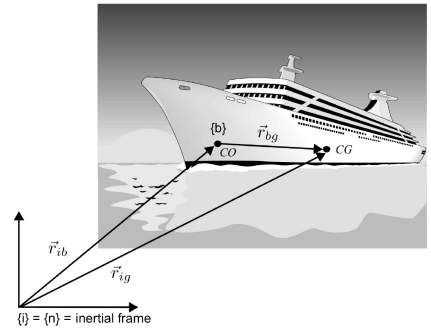
 The equations of motion will be represented in two body-fixed reference points
The equations of motion will be represented in two body-fixed reference points
- Center of gravity (CG), subscript g
- Origin CO of {b}, subscript b
These points coincide if the vector:
Time differentiation of a vector in a moving reference frame {b} satisfies: