Earth- centered reference frames
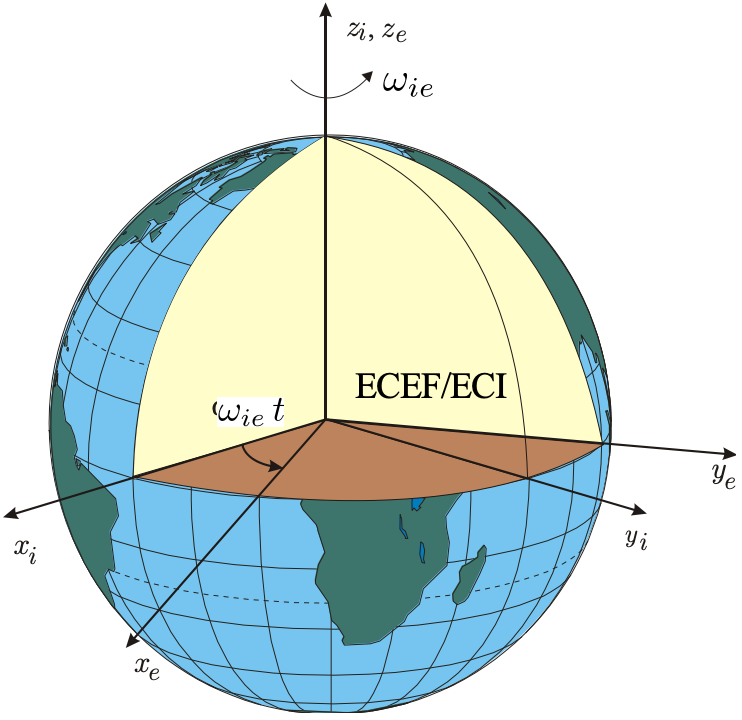
{i}: The Earth- centered inertial reference frame (ECI)
{e}: The Earth- centered- fixed reference frame (ECEF)
Has its origin fixed to the center of the earth but the axes rotate relative to the intertial frame ECI.
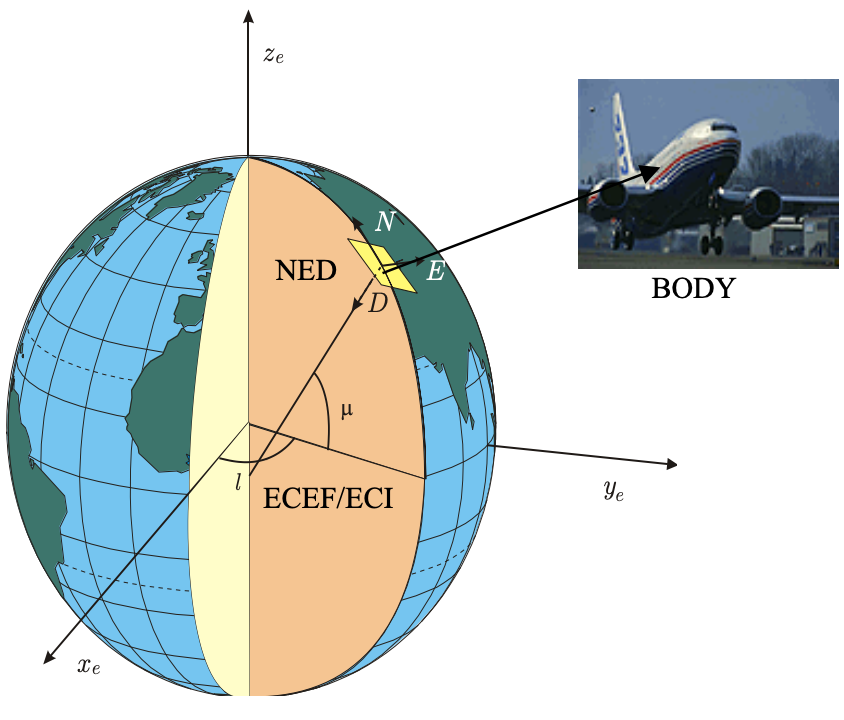
Geographic reference frames (tangent planes)
Usually chosen as tangent planes on the surface of the earth
{n}: The North-East-Down reference frame
Has its origin defined relative to the Earth´s reference ellipsoid (WGS 84), usually as the tangent plane to the ellipsoid with \begin{align*} x_{n} &\to \text{axis points towards true north} \\ y_{n} &\to \text{axis points towards east} \\ z_{n} &\to \text{axis points downwards normal to the earth's surface} \end{align*}
Terrestrial navigation: The tangent plane moves with the craft and its location is specified by time-varying longitude-latitude values. It is usually rotated such that the axes points in the NED directions.
Local navigation:
The tangent plane is fixed at constant values and the position is computed with respect to a local coordinate origin. This plane usually also points in the NED directions.
Body- fixed reference frames
{b}: The body-fixed reference frame (BODY) For marine craft, the body axes are chosen as \begin{align*} x_{b} &\to \text{longitudinal axis (directed from aft to fore)} \\ y_{b} &\to \text{transversial axis (directed to starboard)} \\ z_{b} &\to \text{normal axis (directed from top to bottom)} \end{align*} {f}: The body-fixed flow axes reference frame (FLOW) Flow axes are used to align the x-axis with the craft´s velocity vector such that lift is perpendicular to the relative flow and drag is parallel.
Body- fixed reference points
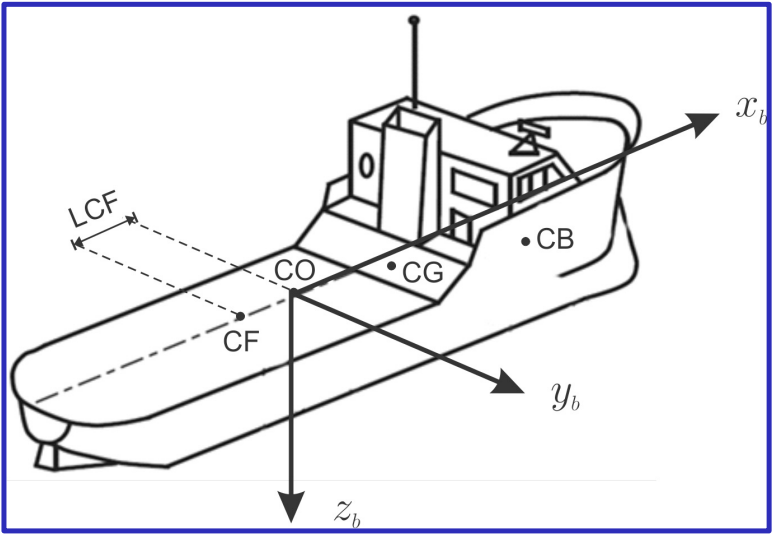 \begin{align*} CG &\to \text{Center of gravity} \\ CB &\to \text{Center of buoyancy} \\ CF &\to \text{Center of flotation} \end{align*}
\begin{align*} CG &\to \text{Center of gravity} \\ CB &\to \text{Center of buoyancy} \\ CF &\to \text{Center of flotation} \end{align*}
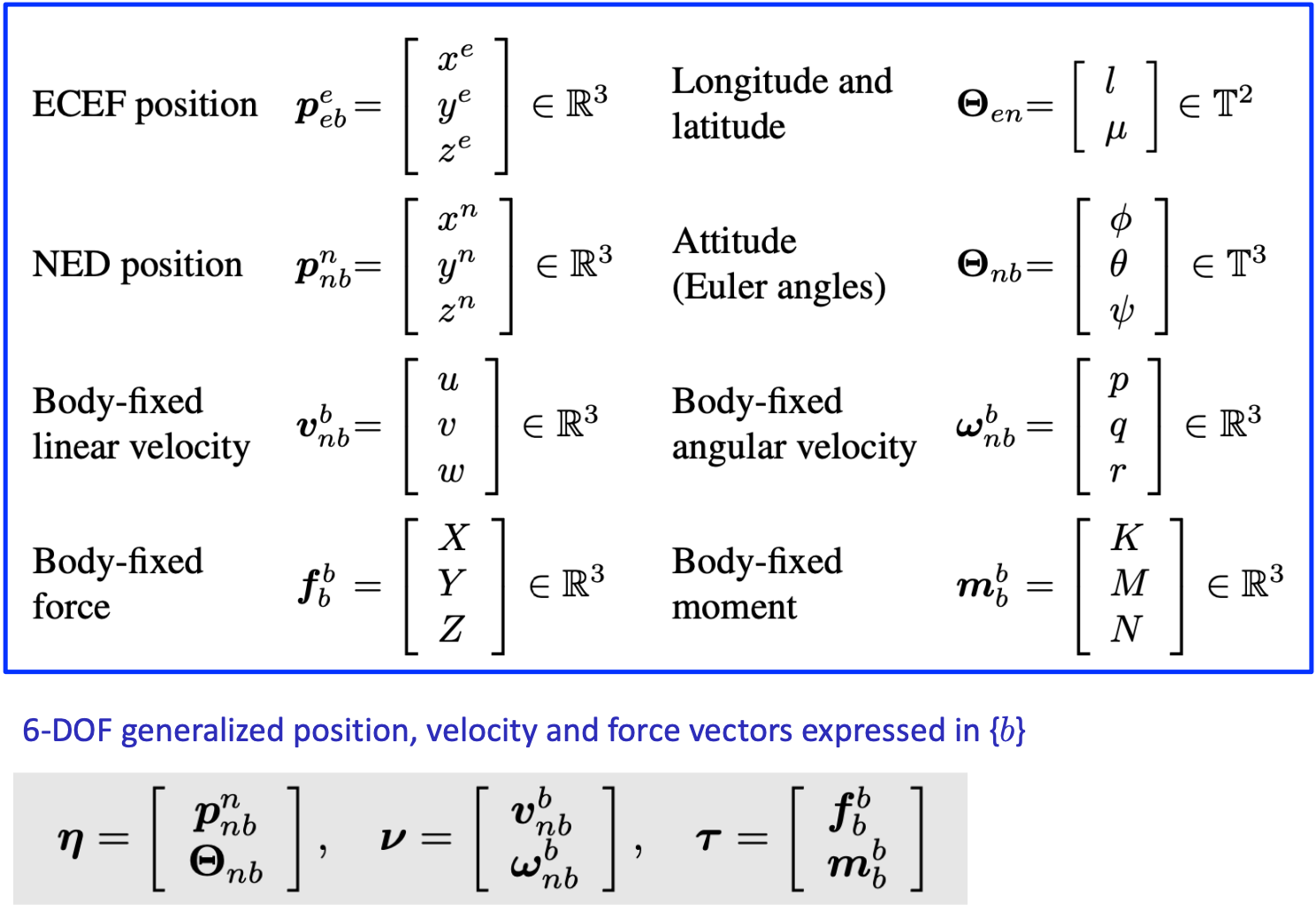
6- DOF motions
6-DOF refers to the freedom of movement of a rigid body in 3-D space. It describes how the object can translate and rotate relative to its own body-fixed axes. It is not used for NED coordinates.
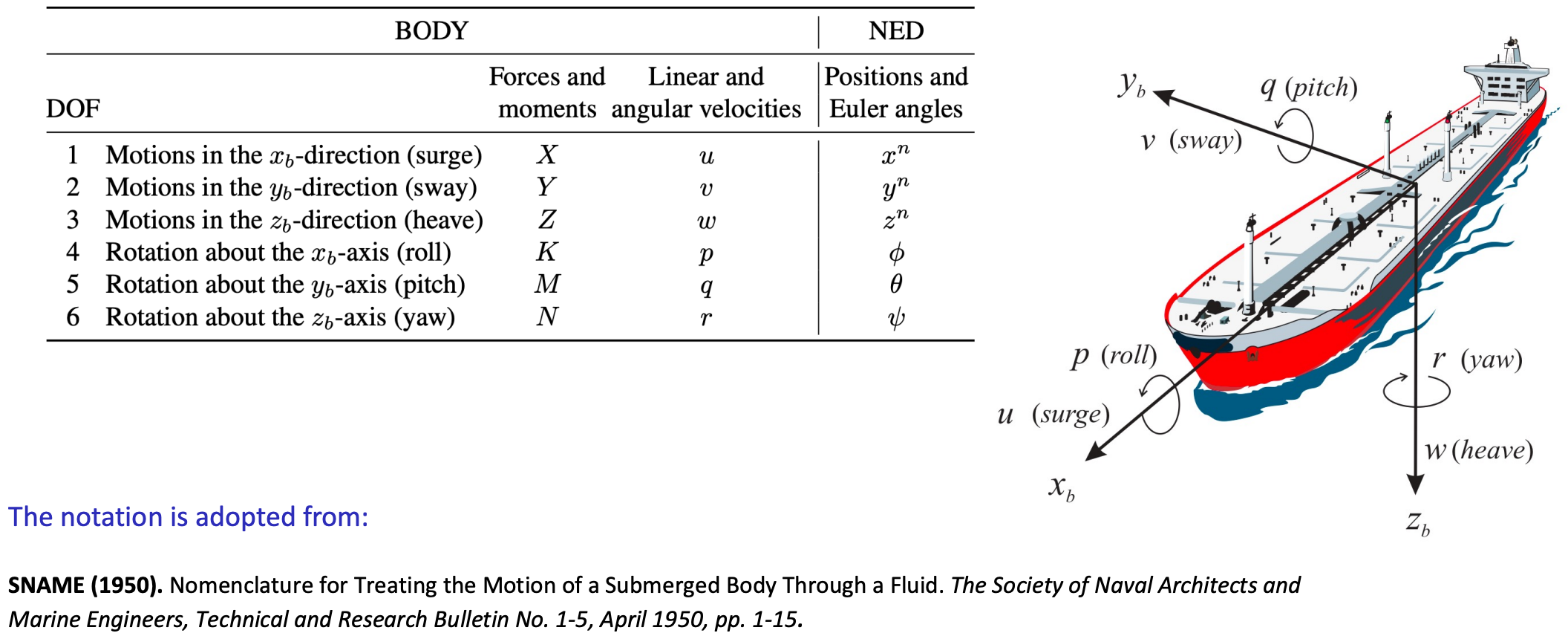
Summary of 6-DOF vectors