Useful properties
Rotation matrices
The following notation is used to transform a vector from one coordinate frame to another:
Skew- symmetry of a matrix and cross- product operator
The vector cross product is defined by:
where
The inverse operator is denoted vex(.) such that
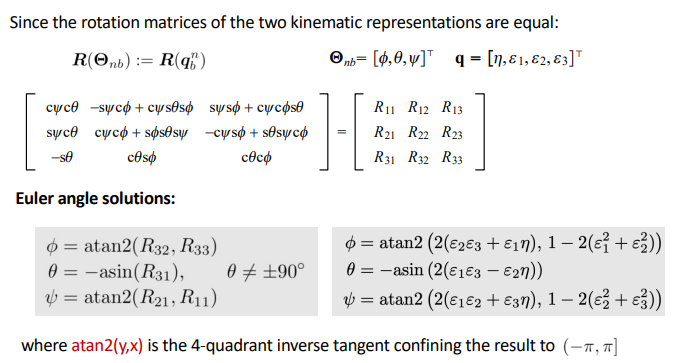
Euler angle transformation
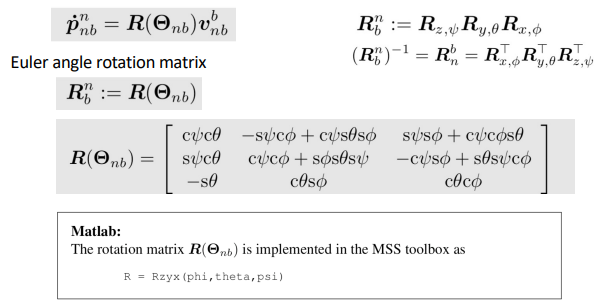
Linear velocity transformation (zyx convention)
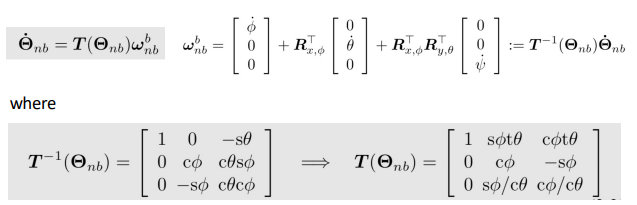
Angular velocity transformation(zyx convention)
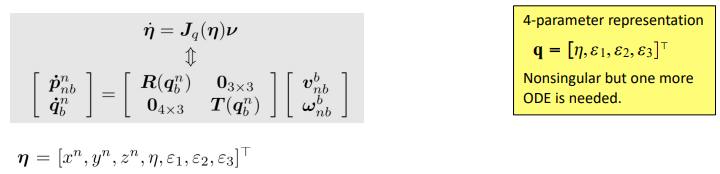
6 DOF kinematic equations

Unit quaternions
Linear velocity transformation

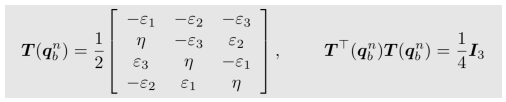
Angular velocity transformation

6 DOF kinematic equations 7 ODEs
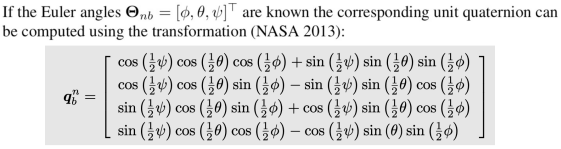
Unit quaternion from euler angles
Euler Angles from a unit quaternion